




MIT研发出一种特别的抓取器,可抓起各种形态的物件
麻省理工学院是一个经常诞生黑科技的地方,最近他们的人工智能实验室与哈佛大学合作,共同研发出一种抓取器,可以抓起各种形状和重量的物件。
不得不说的是开发这个抓取器的竟然来自折纸,据研究人员介绍,“我们希望开发出一个可以打包行李、拿取杂物的机器人。但现阶段这个机械臂能够抓取的物品种类有限,对形状有一定要求。”
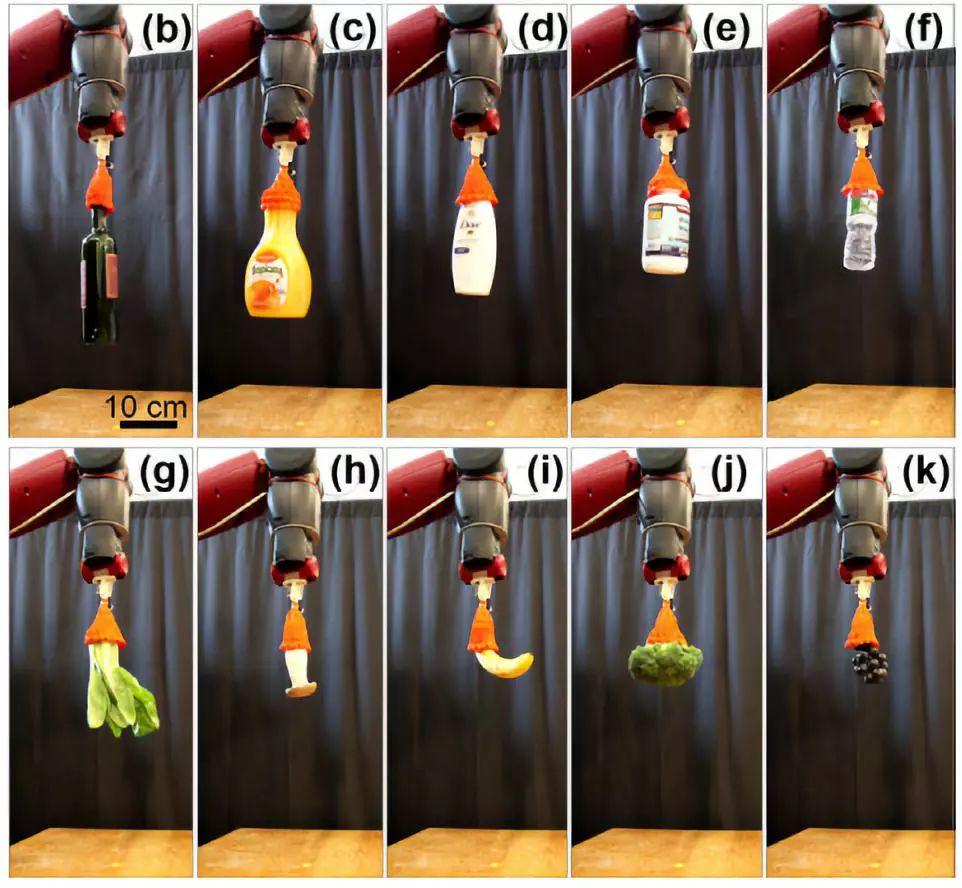
现阶段这个能够抓取和摆放葡萄、鸡蛋、酒瓶、酒杯、蔬菜等等。”
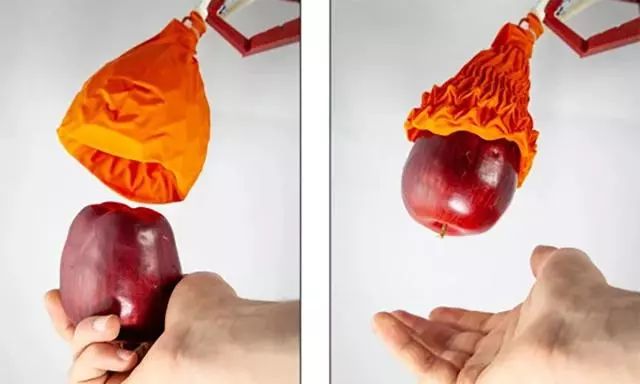
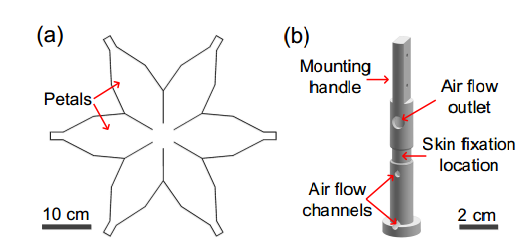
这个形状奇怪的抓取器是一个伞状型,与普通的机械手相比有着很大的不同,有点像一朵花,抓取器是整体是一个骨架结构,由织物包围,是从折纸中得到灵感的。

、
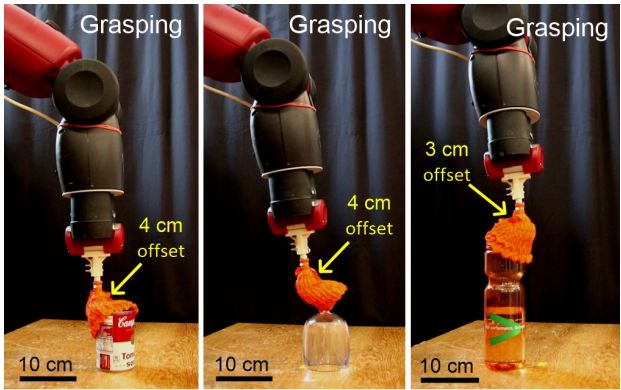
与抓取器连接的连接器带有真空吸管,抓取物品后可以吸走抓取器内部的空气,使其紧紧地握住物品。

普通机械手要抓取柔软的物品很点困难,因为坚硬的手臂本身很难精准地控制抓取力度。
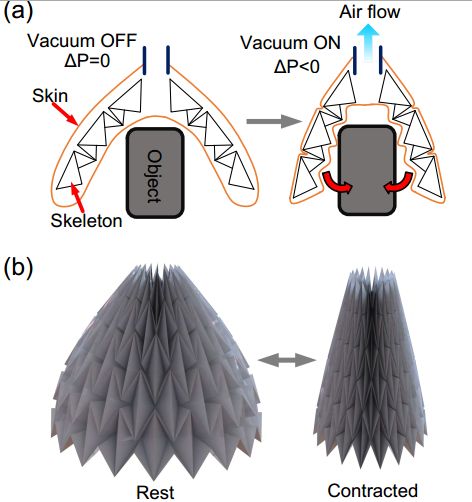
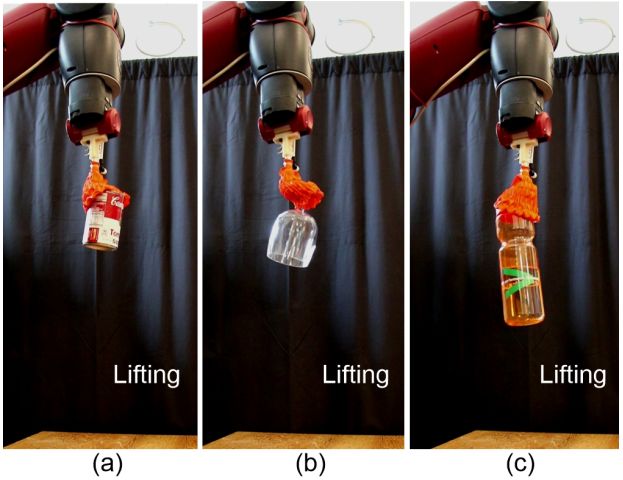
而这个抓取器可以顺利地抓取软性物件,抓住后抽走了空气,骨架收缩,伞状抓取手就可以仅仅地锁着物件。
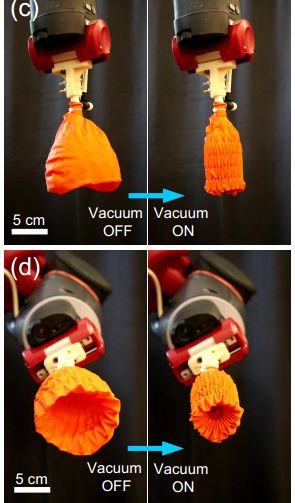

抓取易破易碎的物件时也不会对物件造成损坏,同时又可以把握好抓取力度,能够抓起比自身重120倍的物件。
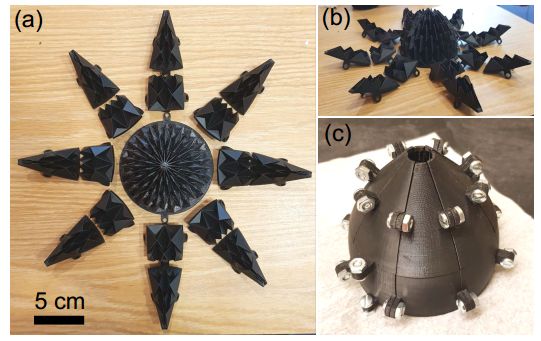
抓取器由三个部分组成:一个是16根硅胶做成的骨架,一个连接器和外层的轻质皮。

实际上抓取器不是抓住物件,而是“嵌入”物件表面,是受一种叫“魔球”折纸工艺品所启发,一张矩形纸张折成的“魔球”可以在圆形与圆柱形之间自由切换。

研究团队计划春季的蒙特利尔的机器人与自动化国际会议上展示出这个抓取器。









MIT研发出一种特别的抓取器,可抓起各种形态的物件:等您坐沙发呢!